research paper
IEEE International Conference on Robotics and Automation (ICRA), 2024
Flagship Project
The SVAN Project explored environmental monitoring using remotely operated land, air, and underwater robots, supported by a van-based operations platform for the robot team and field laboratory. Environmental experts could control the robot team from anywhere in the world through a telepresence interface.
SVAN is an environmental robotics research project initiated and developed by Anna Adamczyk and Alexander Moortgat-Pick at the Technical University of Munich, exploring telepresence, distributed robotic systems, and environmental monitoring in real-world settings.

— Alexander Moortgat-Pick, SVAN Project Lead
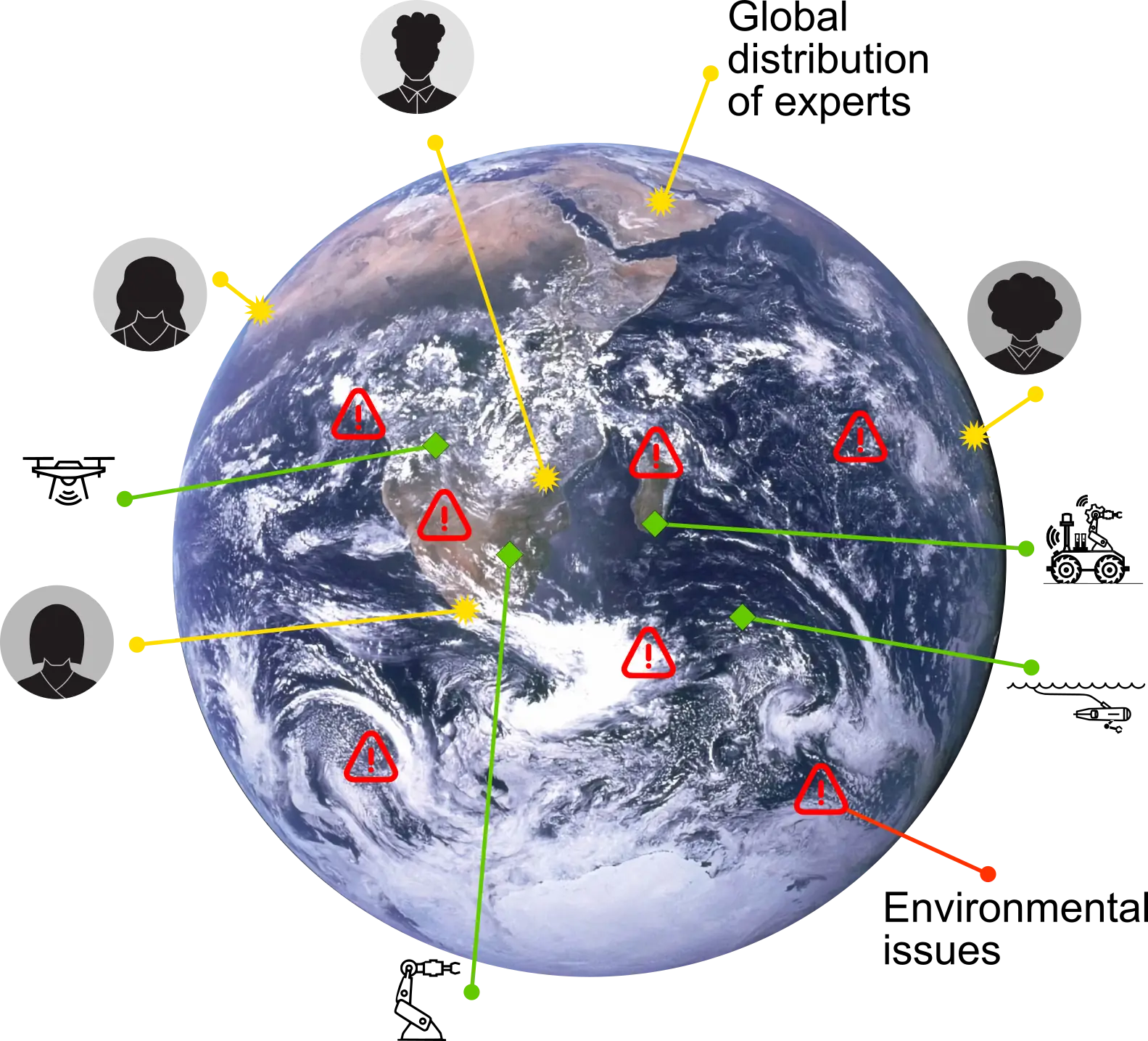
Environmental monitoring often faces a basic trade-off. Some methods cover large areas but only give rough insights. Others provide detailed observations but require a lot of time and expert effort.
Field researchers and conservationists are already doing critical work. But their tools have not kept up. Human divers can only go so deep, for so long, in so many places. Boats are costly to deploy. Fixed sensors capture only a small part of what is happening.
SVAN was built to change that equation by giving experts tools that match the scale of the problem: multiplying their reach through environmental robotic avatars. One expert. Many places.

Continuous data
Annual expeditions capture only brief snapshots and often miss rapid environmental change.

Remote access
Many critical ecosystems are inaccessible, hazardous, or too costly to reach regularly.
Manual Fieldwork
Many environmental measurements require tedious and time-intensive fieldwork.

Expert access
Environmental monitoring often requires experts to be physically present at the site.
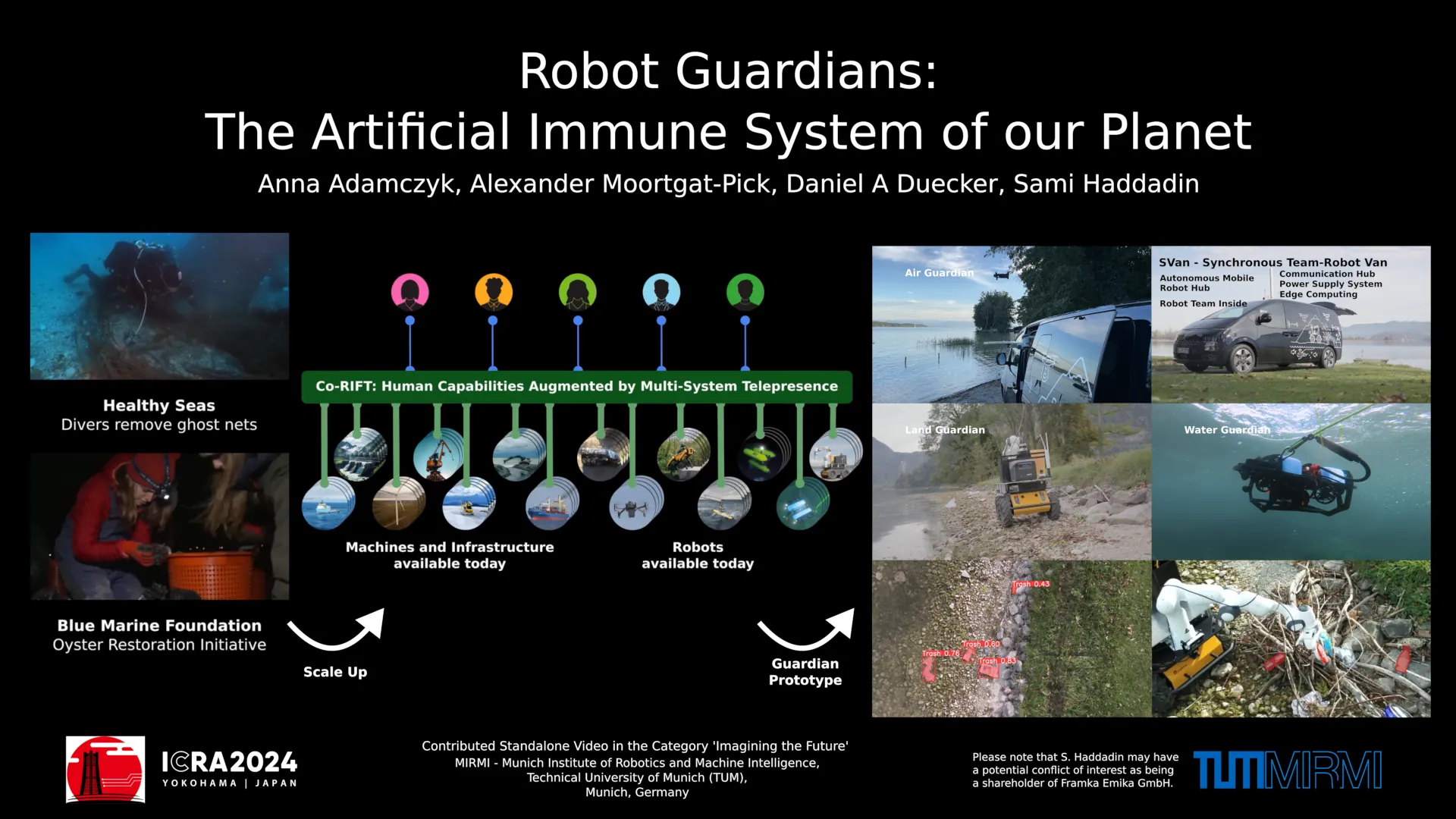
SVAN is built around a van-based mobile robot hub: a self-contained field operations base for robots that deploys wherever it's needed. It provides the infrastructure needed for robots to operate in nature as well as for environmental experts to connect to the robots globally, and serves as a mobile field lab for the technician travelling with SVAN.
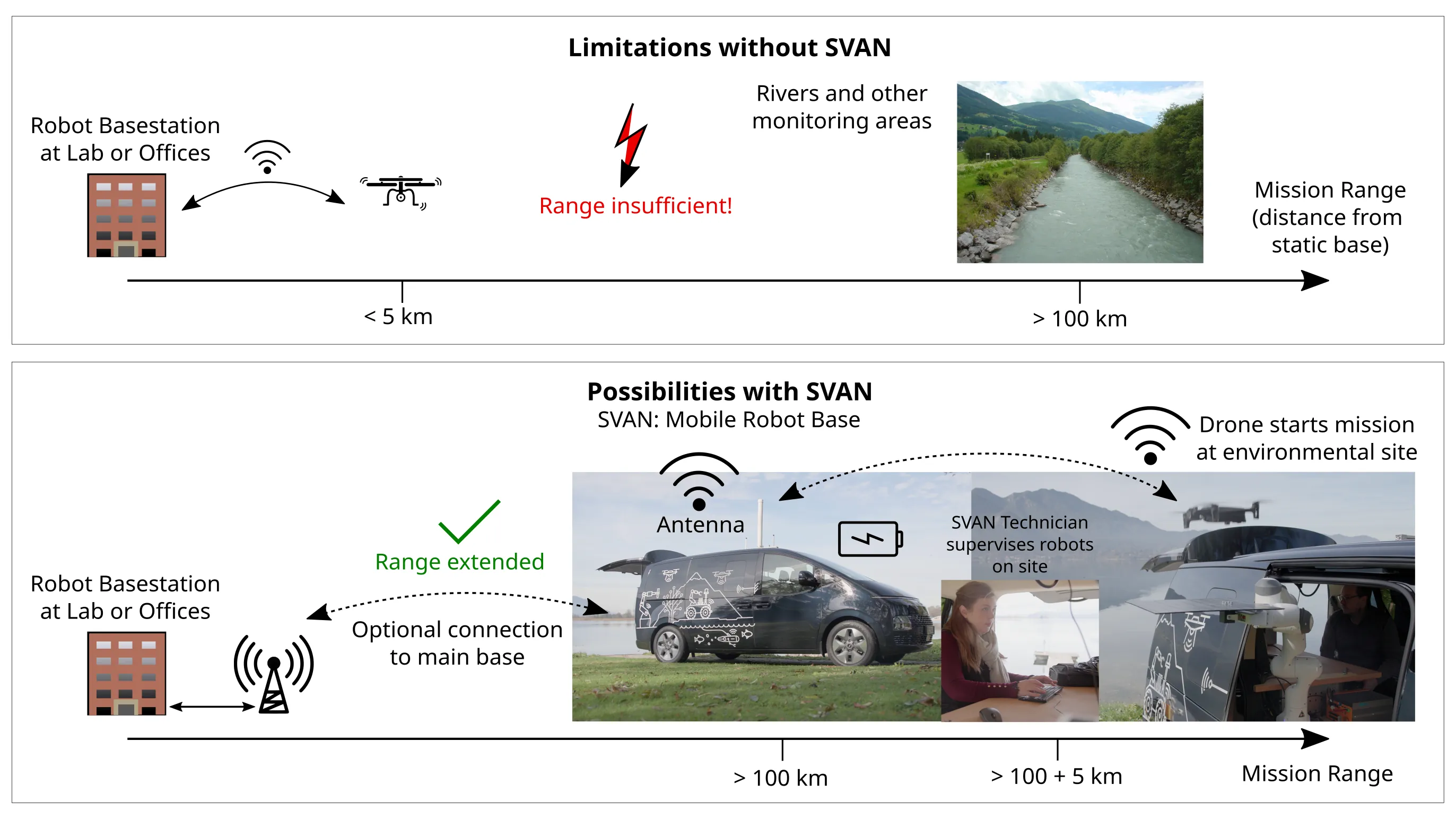
Field robots are already capable of performing environmental tasks: collecting water samples, mapping coastlines, inspecting underwater structures. But they need power, communication, and a connection back to the people operating them. In practice, that means a base. And that base is usually static: a building, a station. Which means the further the mission site, the less practical the whole operation becomes. And environmental missions, by definition, happen where infrastructure ends — and that is a good thing.
That gap between where robots can be useful and where they can actually operate has been the limiting factor. SVAN closes it.
With a technician on site, a coordinated team of land, air, and underwater robots can be launched from the hub. The entire system is designed for telepresence: environmental experts anywhere in the world can connect, observe, and control the robot team live, seeing what the robots see, doing what the robots do, to assess, monitor, and protect the environment around them, without being on-site.
Ground robots for terrestrial monitoring and navigation in coastal and riparian zones.
Aerial drones for overview, mapping, and rapid deployment across large areas.
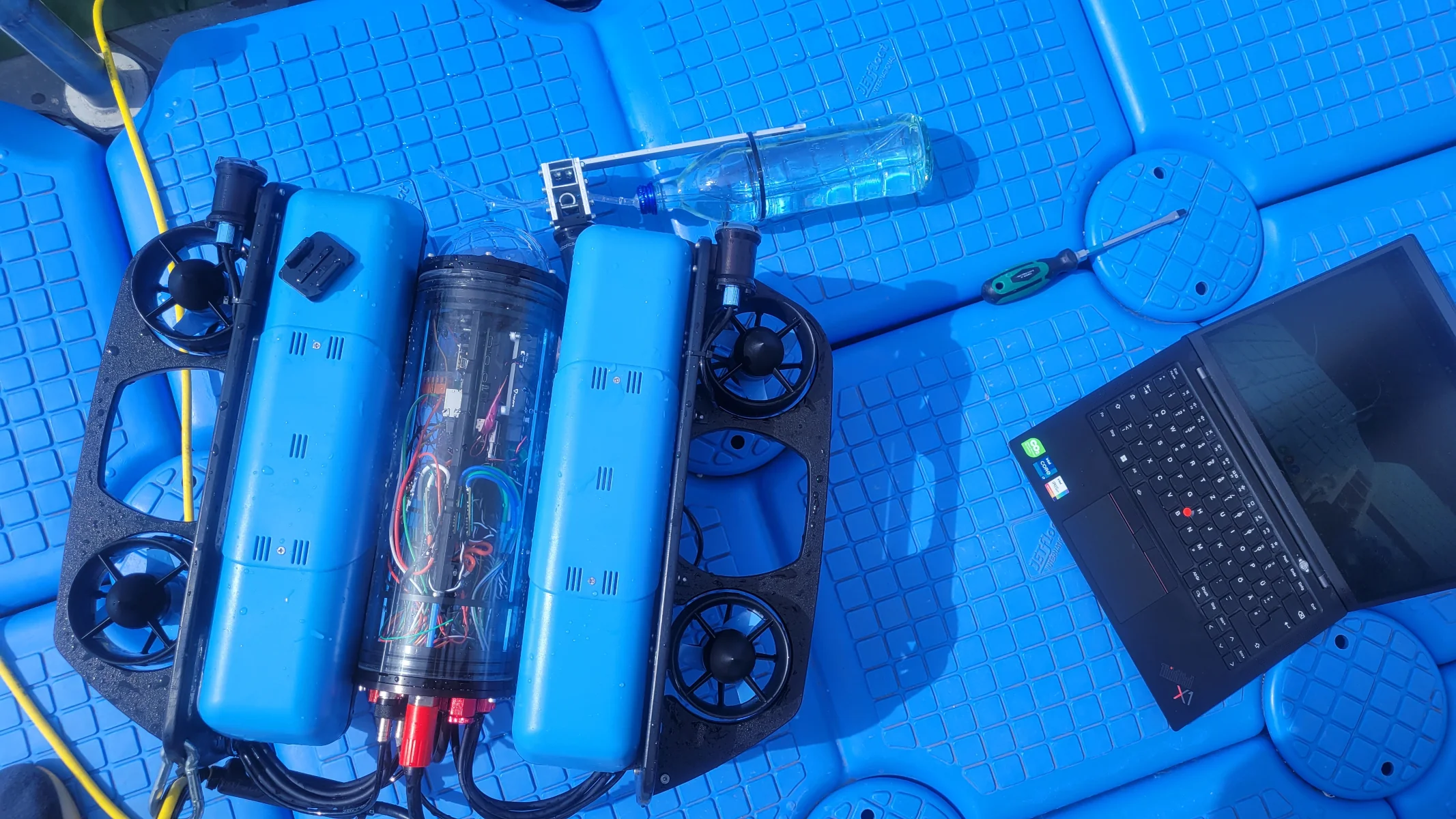
Underwater and surface vehicles for aquatic monitoring, sampling, and inspection.

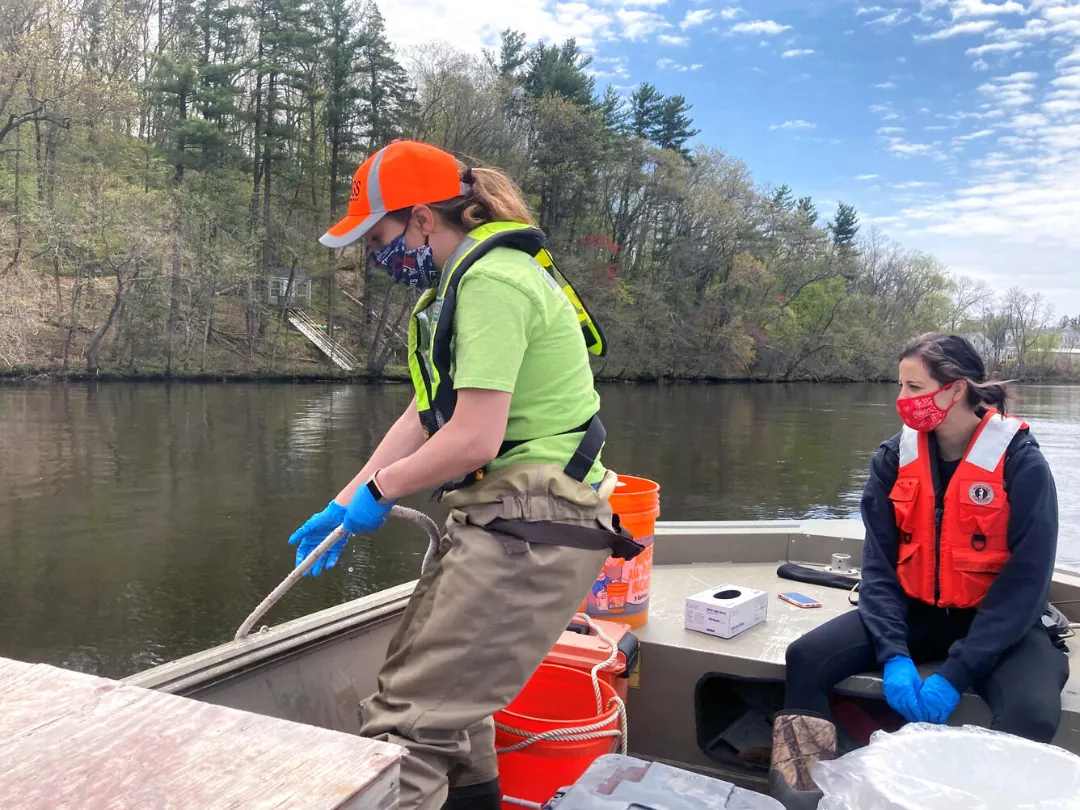
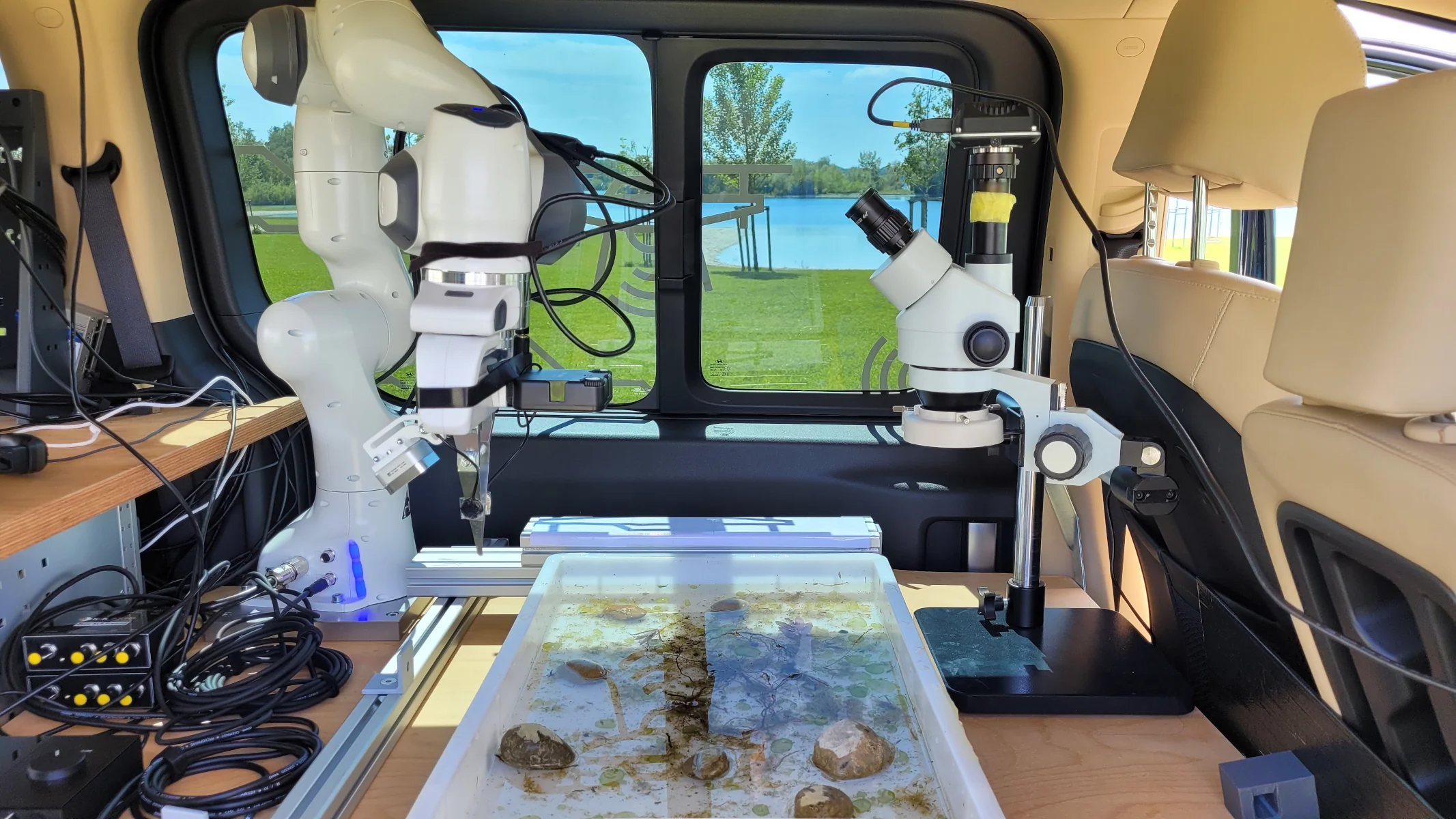
Field deployments and environmental monitoring research carried out during the SVAN project. The photographs document SVAN as a mobile field laboratory during field experiments, with the robot team conducting telerobotic environmental monitoring.


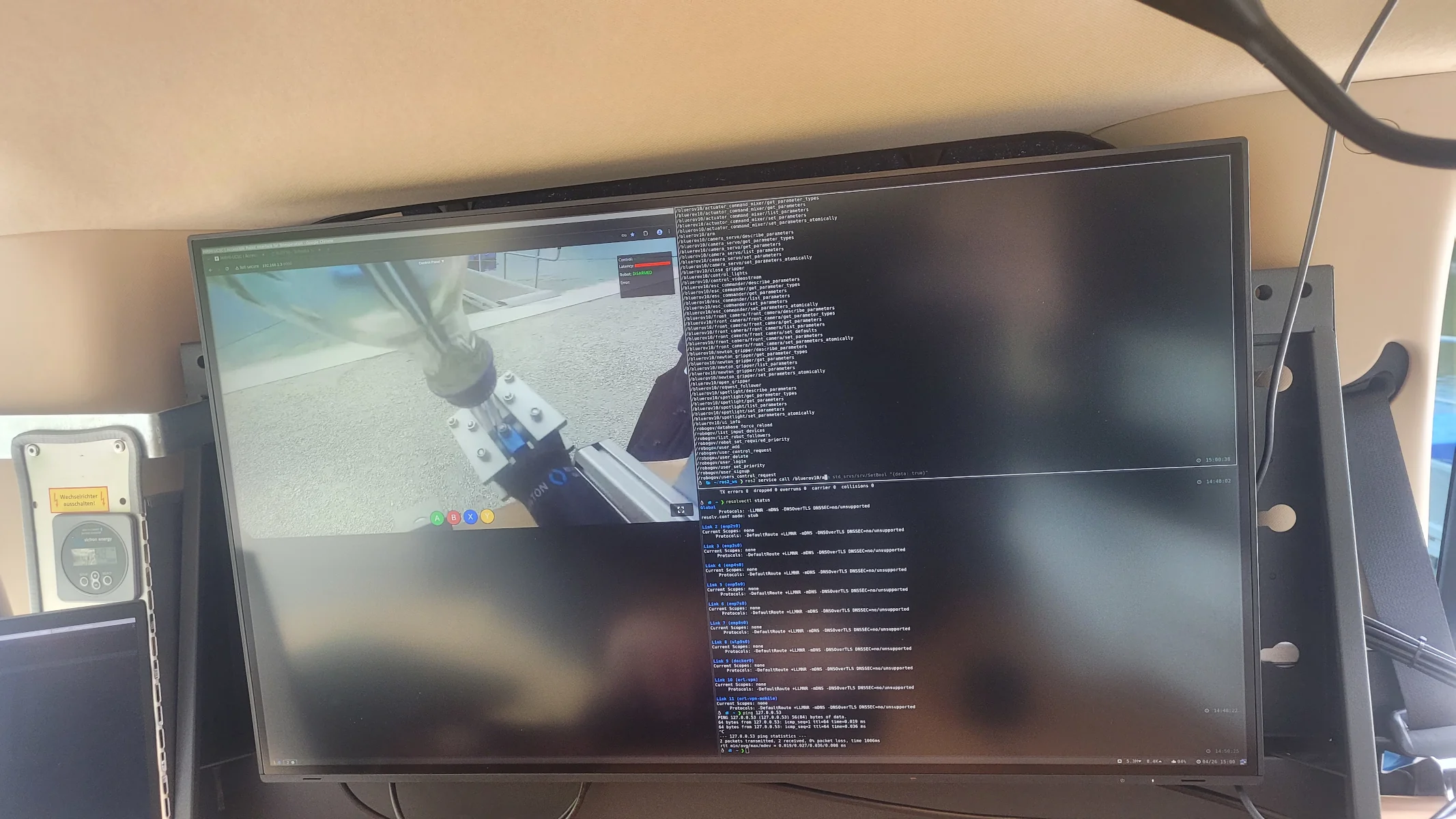

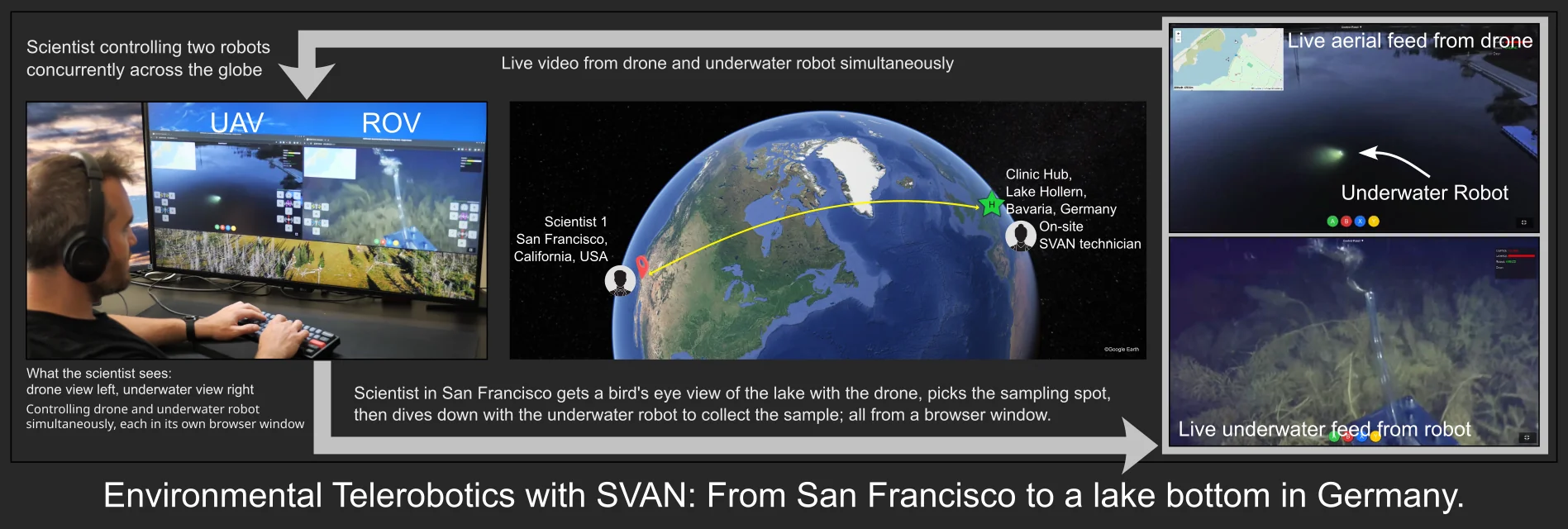
A scientist in the United States opens a browser, logs in, and takes control of a drone hovering over a lake in Germany. He flies it over the water to find the right spot. Then switches to the underwater robot, navigates it down, and collects a water sample.
Minutes later, the technician places the sample under the microscope in SVAN's onboard field lab. Still from his laptop, the scientist takes control of the robotic arm, adjusts the focus, and analyzes the sample for harmful algae.
Our flagship project SVAN shows, that despite current technical challenges telerobotic environmental monitoring with robots specialized to their domain, air, land, water, and their environmental task is possible now.
Drone overview
Scientist logs in remotely, takes control of the drone and flies over the lake to select the sampling site.
ROV deployed
Technician deploys the underwater robot. Scientist navigates it to the selected spot, guided by live drone footage.
Sample collected
Scientist operates the sampling equipment remotely. Water sample collected underwater, retrieved by the technician.
Live microscopy
Scientist logs back in, now controlling a robotic arm operating a microscope. Sample analyzed live for harmful algae.
Assessment complete
Water safety confirmed remotely, in real time. No travel. No delay.
Innovation for Nature — 3-part series
From STARIA to SVan
How a production van became a mobile robot hub for environmental fieldwork.
James Bond-Modell im Auftrag für die Umwelt
SVAN featured on German television. A look at the project through the lens of environmental innovation and robotic fieldwork.
Watch on YouTubeMünchner Wissenschaftler überwachen und reinigen Umwelt mit Robotern und Drohne
Germany's leading technology publication covers SVAN's approach to environmental monitoring.
Mit Robotern gegen Umweltverschmutzung
Switzerland's largest daily newspaper on SVAN and the fight against environmental pollution.
Im Auftrag der Umwelt
One of Germany's most-read news magazines on the Hyundai × TUM partnership behind SVAN.
Mobiler Robotikhub im Kampf gegen Umweltverschmutzung
National daily on SVAN's mobile robot hub concept and its environmental mission.
Mobiler Robotikhub: Umweltbewusste KIs
Mobility industry press on SVAN's robotic field deployment and robot-team coordination.
Hyundai svela i primi robot anti-inquinamento — ecco come funzionano
Italy's largest newspaper on SVAN's anti-pollution robot system and how it works.
Selected papers and video publications across telemanipulation, autonomous mission cycling, mobile field robotics, and environmental robotics.

SVAN was made possible by the support of those who saw its potential and backed the project at key moments along the way.
Research Funding
Dobeneck Technology Foundation
The Dobeneck Technologie Stiftung believed in SVAN at its earliest stage, when it existed only as a proposal. Their early funding made it possible to move the project from concept to reality and laid the foundation for our work in environmental robotics. Without their support, SVAN would never have left the page.
Sponsor
Hyundai Motors
Europe
It began with a cold email and a hunch: that Hyundai’s work with Healthy Seas to recover ghost nets from the ocean was a natural match for SVAN. They believed in the idea, sponsored the van that became SVAN’s mobile hub, and supported us as we introduced the project to the world.
Institutional Support
Technical University
of Munich
We thank TUM for financial support, laboratory facilities, and hardware, as well as the MIRMI leadership for their organizational support. We are especially grateful to our colleagues who supported the project in the lab, in the field, and during demonstrations.
Field Documentation
Get Flashed Media
Get Flashed Media documented SVAN’s missions in the field, often under demanding and unpredictable conditions. Their team captured the moments where robotics meets real environments, and their patience during experiments ensured that the process behind the work was recorded as well as the results. We are grateful for their professionalism and for allowing us to use the footage for research and communication.
Environmental Inspiration
Healthy Seas
Healthy Seas inspired important parts of the SVAN vision through their work recovering ghost nets from the ocean. Their efforts highlight the scale and difficulty of environmental intervention in the real world. Insights into the challenges faced by divers and field teams helped shape our thinking about how robotics can support environmental missions safely and effectively.
Vehicle Conversion
Bott
Bott transformed the Hyundai Staria from a passenger vehicle into the mobile robotic platform that became SVAN. Their team implemented the technical conversion with great precision, ensuring the vehicle could support research equipment, field operations, and specialized hardware, including the mounting system for a tactile robotic arm.
The SVAN project marked an important milestone in turning environmental robotics from an abstract idea into a working system. By combining robotics, sensing, telepresence, and field deployment, SVAN explored how robotic platforms can operate directly within natural environments.
But SVAN is only one step within a broader research direction. Environmental robotics is a young field shaped by the challenges of operating robotic systems in complex, real-world ecosystems. These challenges continue to drive new ideas, systems, and experiments.
Environmental robotics explores how robotic systems can monitor, understand, and support natural environments. From sensing and observation to intervention and restoration, the field connects robotics, ecology, and distributed systems into a new domain of environmental research.