Environmental Robotics
Environmental robotics is the use of autonomous and teleoperated robots to monitor, sustain, protect, and restore natural environments.

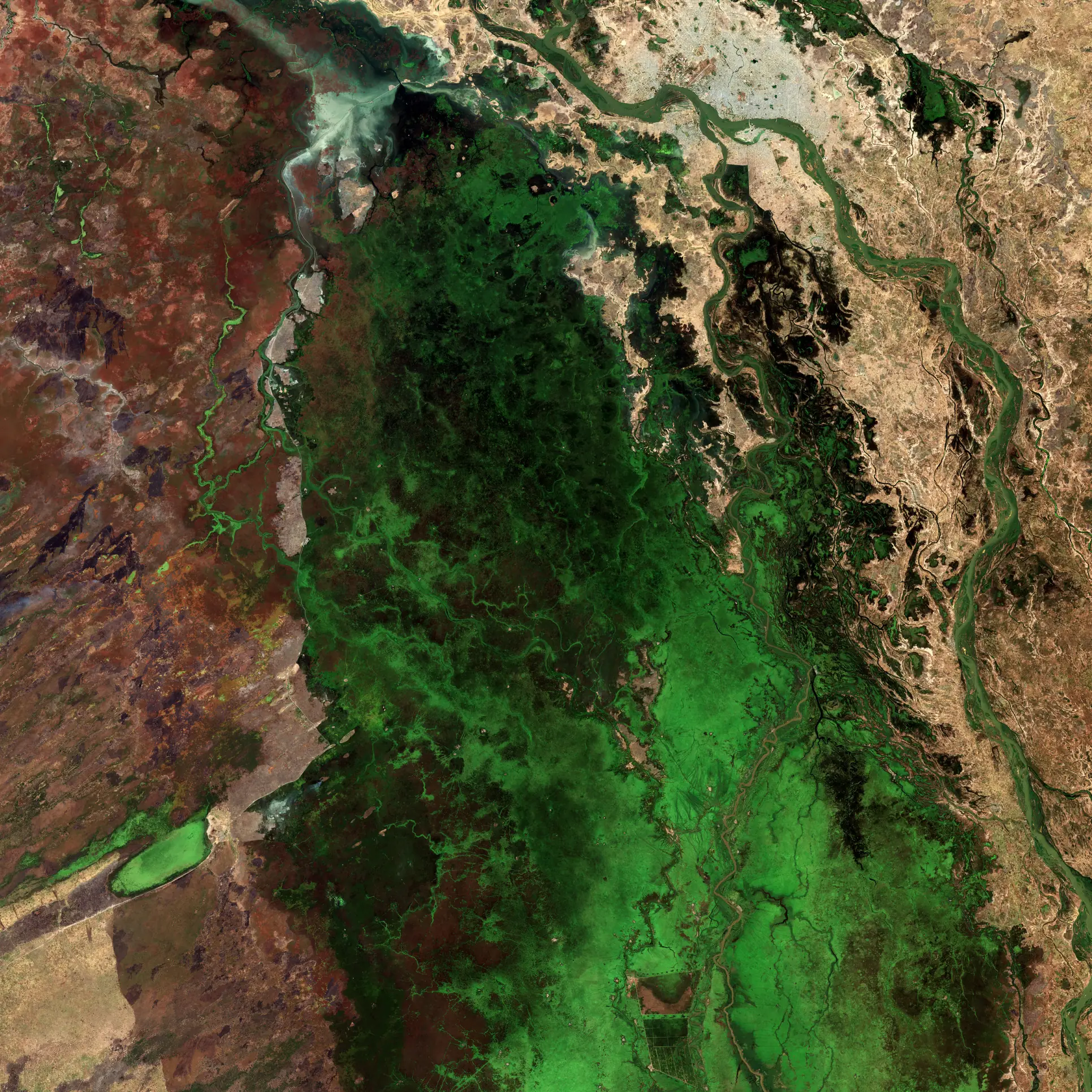
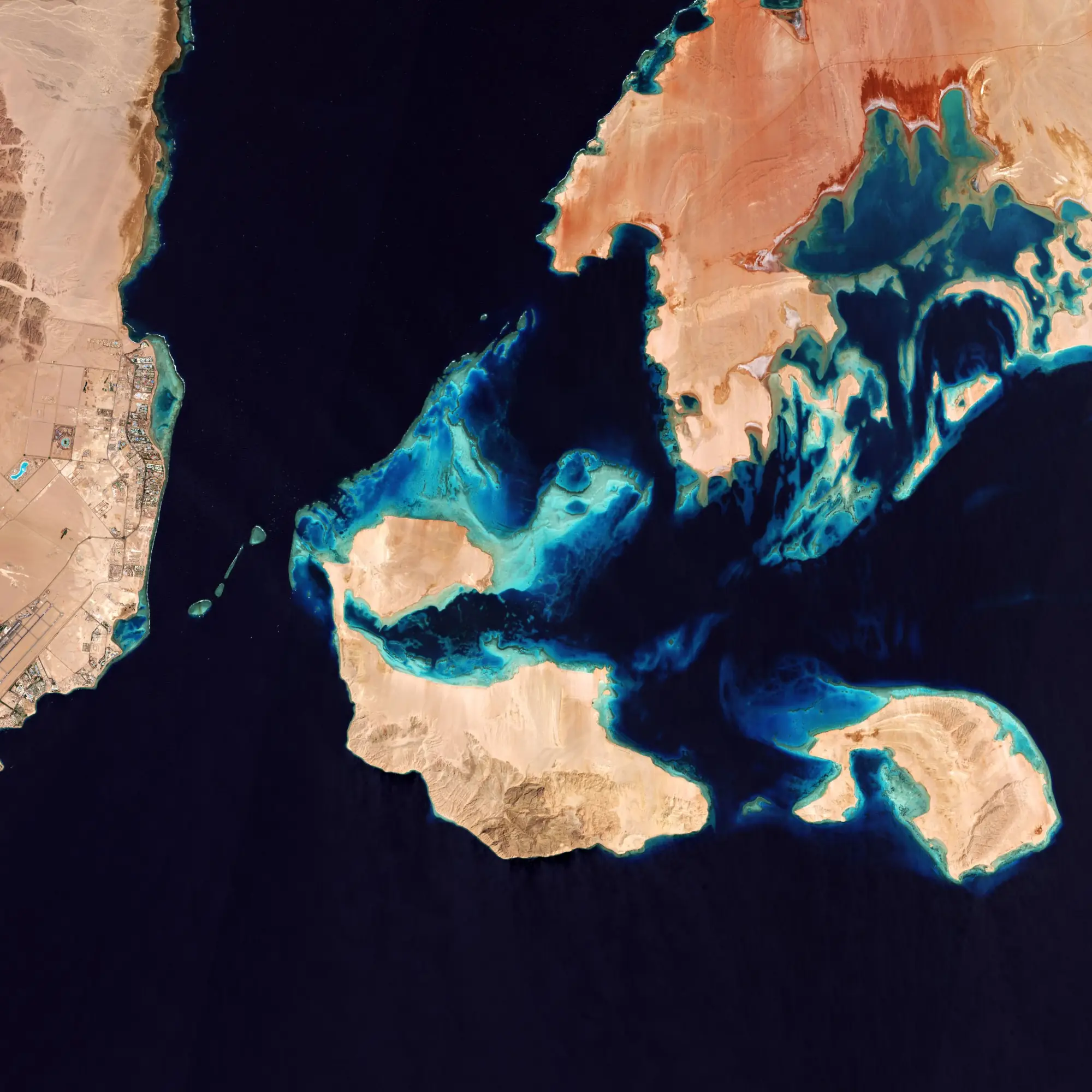
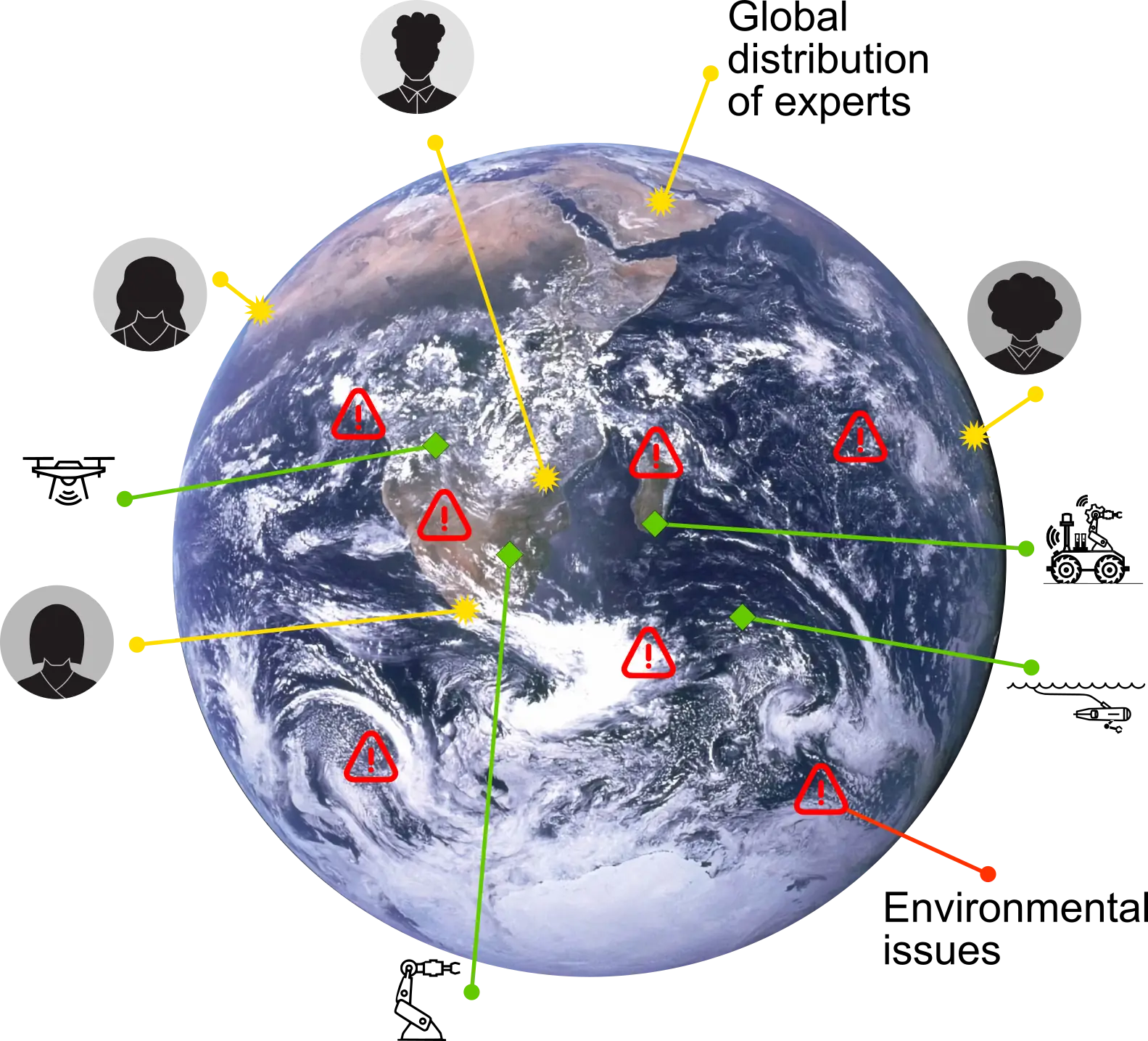
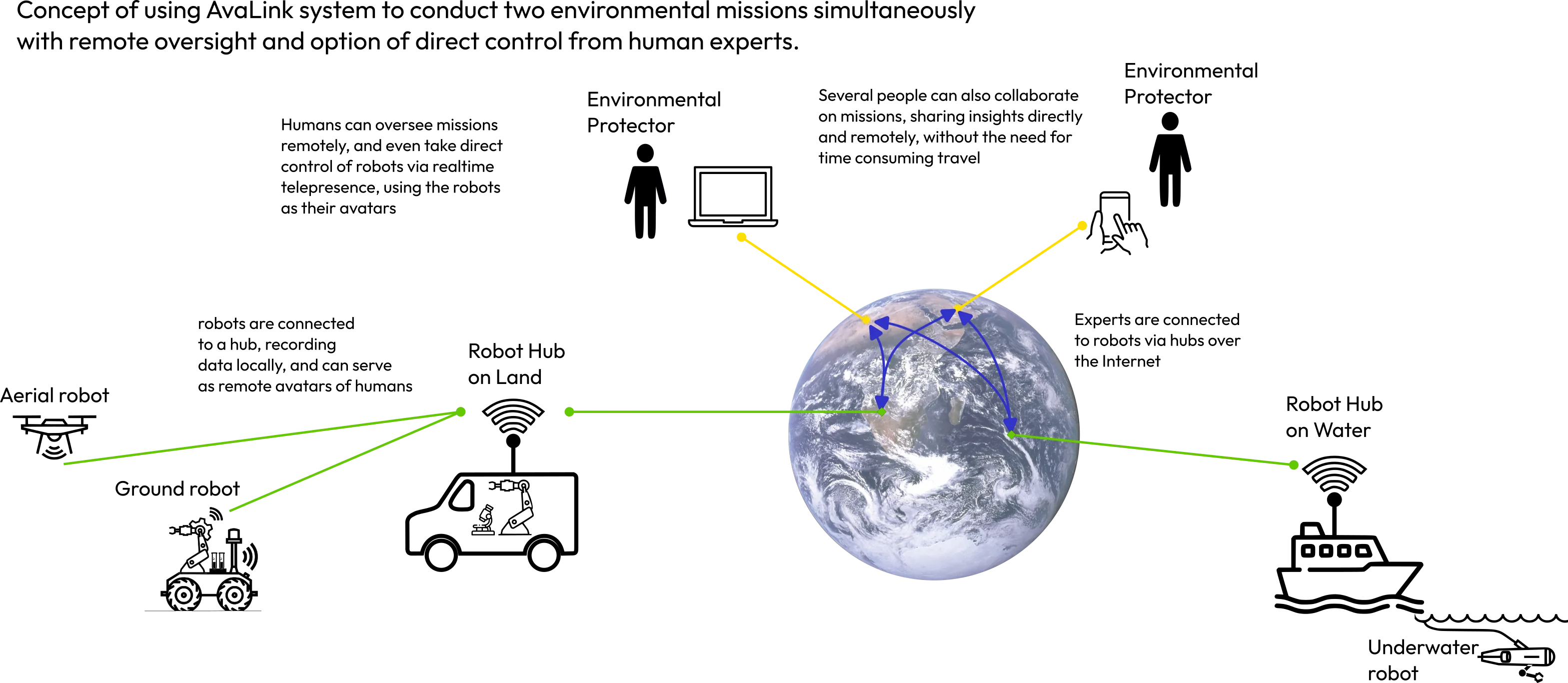
Environmental robotics explores how robotic systems can help observe, understand, and protect natural environments. Robots equipped with sensors can collect environmental data, monitor ecosystems, and study environmental change across lakes, forests, oceans, and urban spaces.
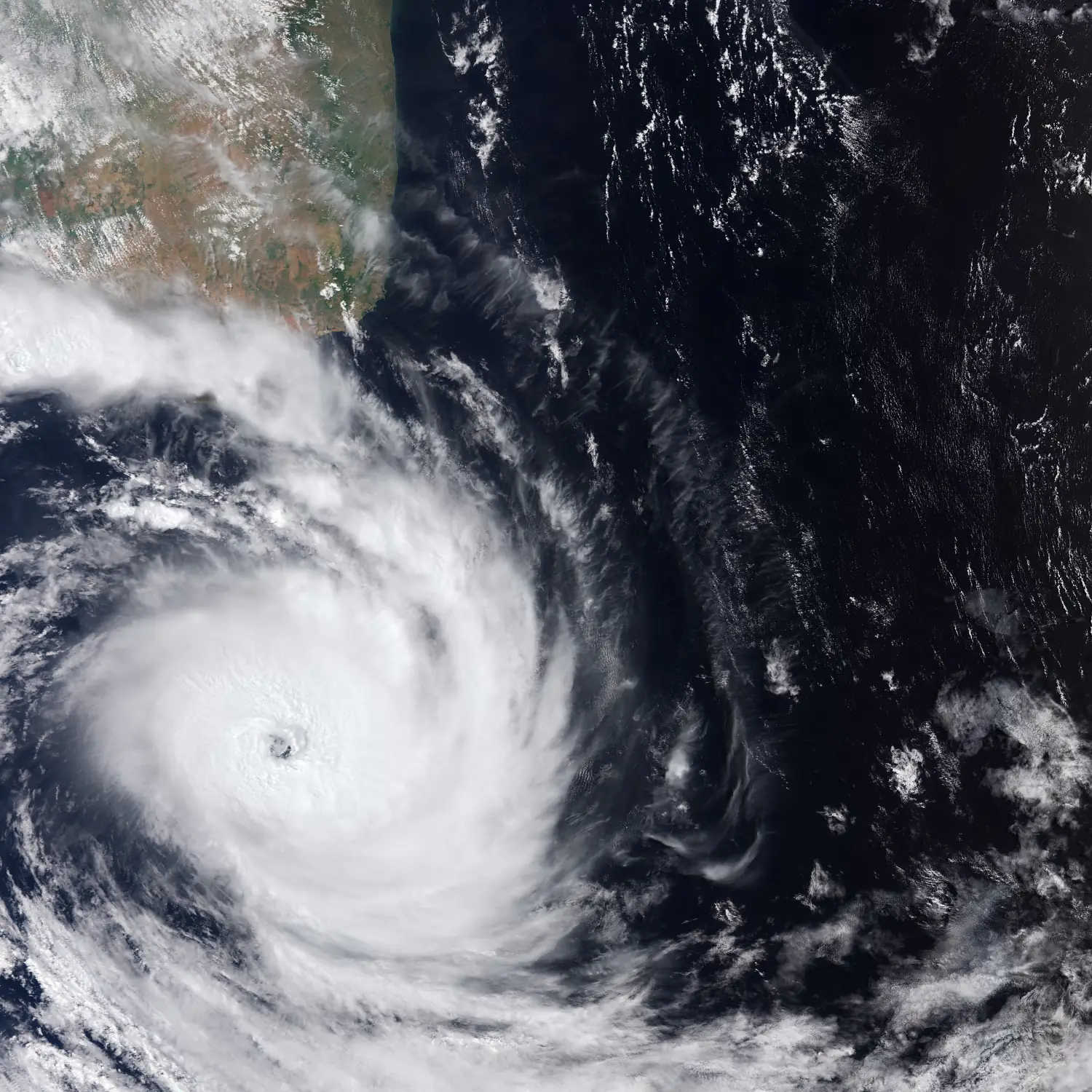
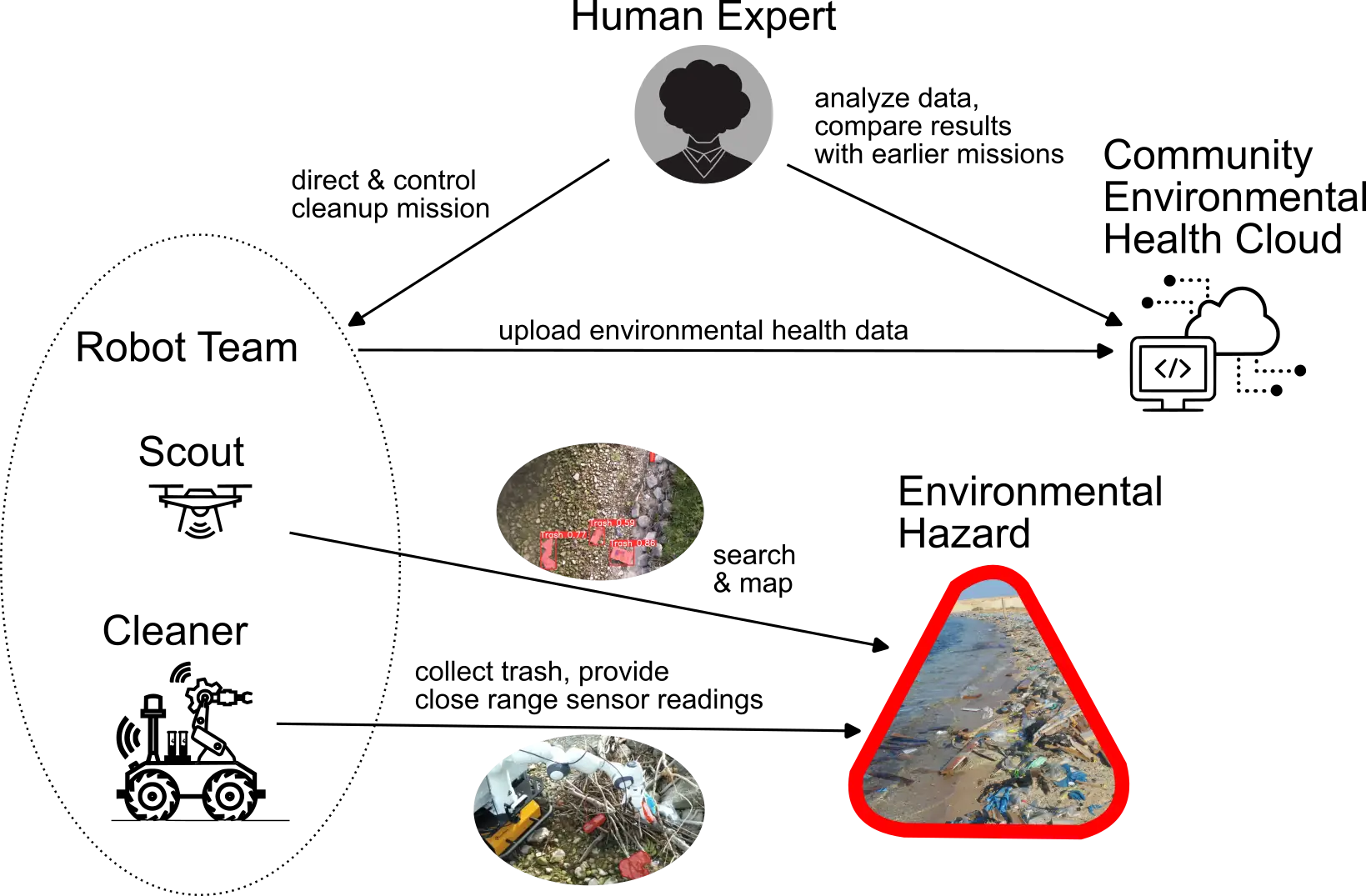
Beyond observation, environmental robotics can also support direct intervention. Robotic systems may assist in pollution monitoring, environmental cleanup, ecosystem restoration, or rapid response to environmental hazards. By combining robotics, sensing technologies, and distributed systems, environmental robotics extends our ability to both study and actively protect the natural world.